





Untrasonic Sensor
-> The Ultrasonic Sensor in EV3 is a special device that helps the robot "see" using sound waves.
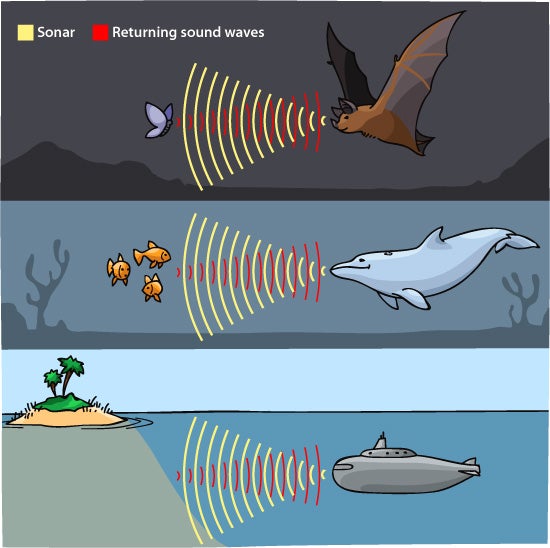
->It's kind of like how bats or dolphins or submarines use echolocation to find their way around!
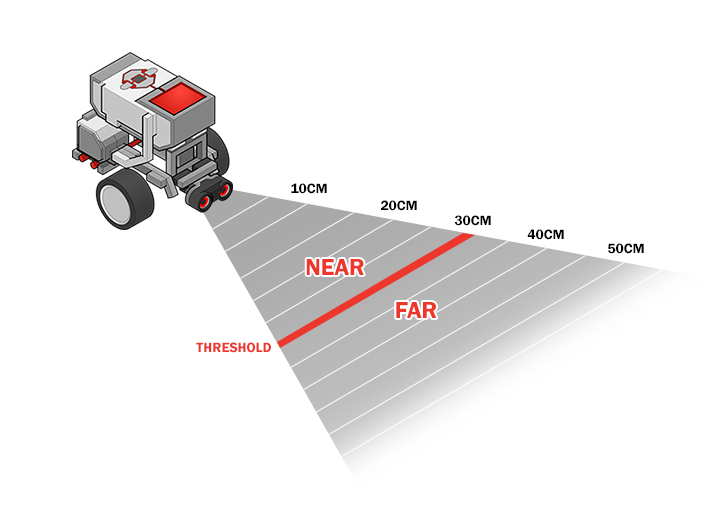
1- The Ultrasonic Sensor sends out sound waves, which are like tiny vibrations you can't hear. These sound waves bounce off objects and come back to the sensor.
2- By timing how long it takes for the sound waves to return, the sensor can figure out how far away the object is.








