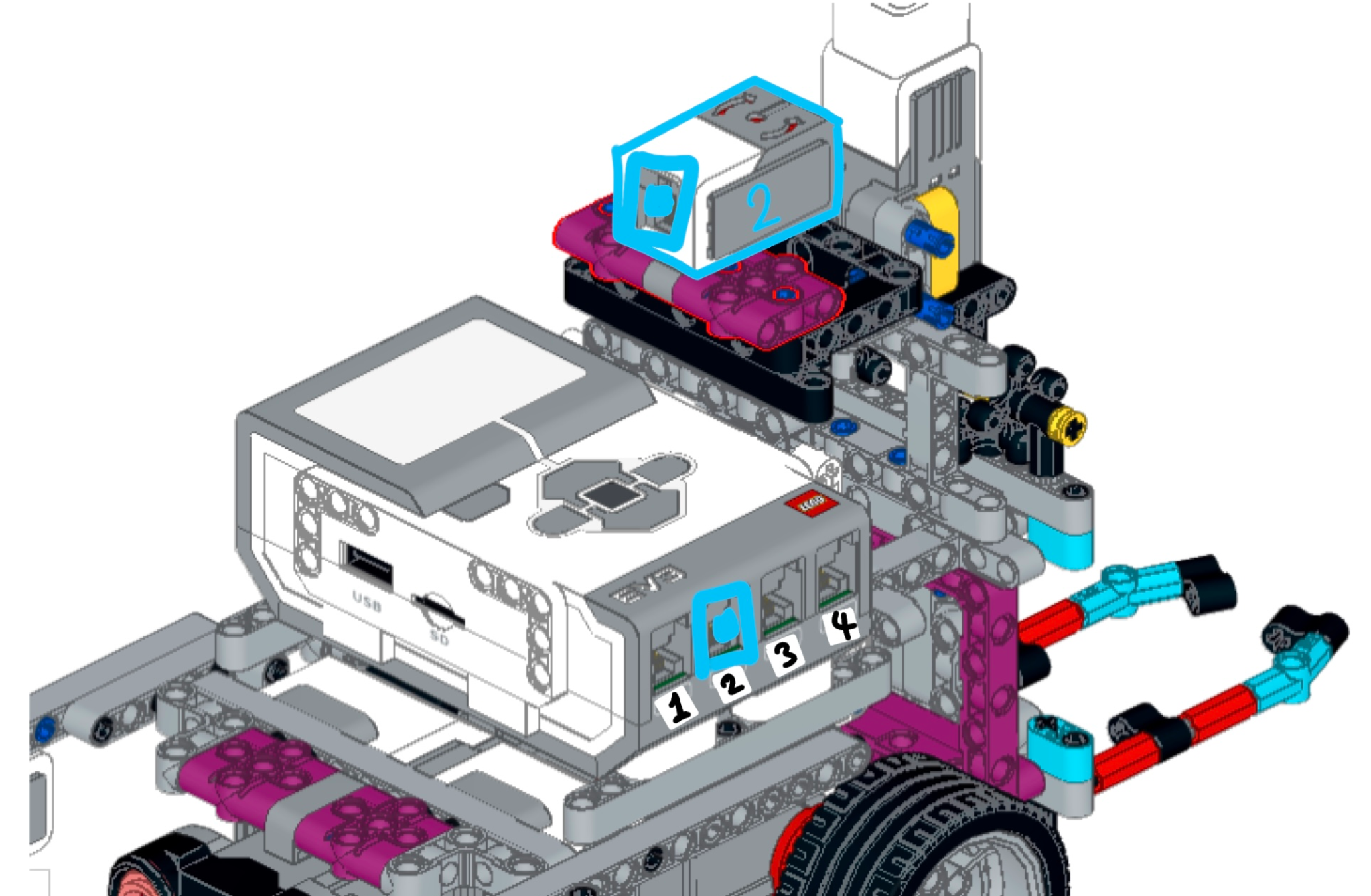
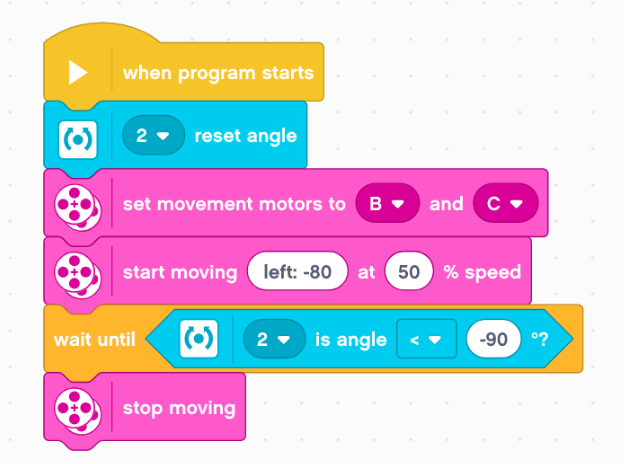
Gyro Sensor

-> The Ultrasonic Sensor in EV3 it help the robot to make accurate turns.
TIt's especially handy for tasks like driving in a straight line, making precise turns, or maintaining balance on two wheels.
Without the Gyro Sensor, the robot might wobble, tip over, or get lost easily.

The Gyro Sensor is like a compass inside the robot's brain. It helps the robot know:
Which way it's facing, just like how you know which way is north when you use a compass.