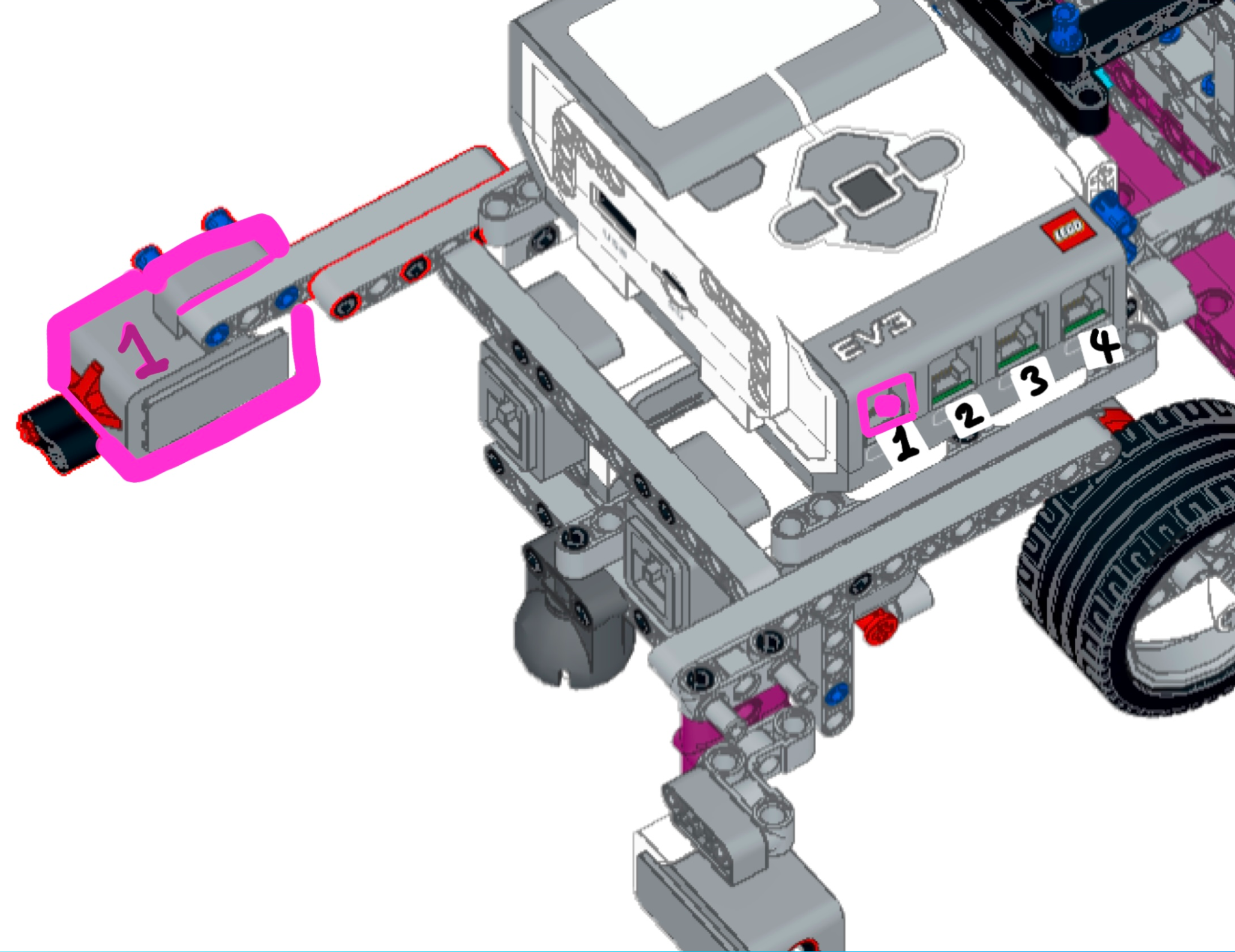
Touch Sensor
.png)
-> The touch sensor in EV3 is a small device that detects physical contact, like when you push a button.
-> The touch sensor helping robots interact with the world around them and making them smarter and safer!
Sensors in EV3 are very important because they help the robot "see" and "feel" its surroundings in order for EV3 to make smart decisions based on what it senses.
There are 5 type of sensors:
-> The touch sensor in EV3 is a small device that detects physical contact, like when you push a button.
-> The touch sensor helping robots interact with the world around them and making them smarter and safer!

If it shows zero (0), it's released.
If it shows one (1), it's pressed.

1- Press
2- Robot begin moving
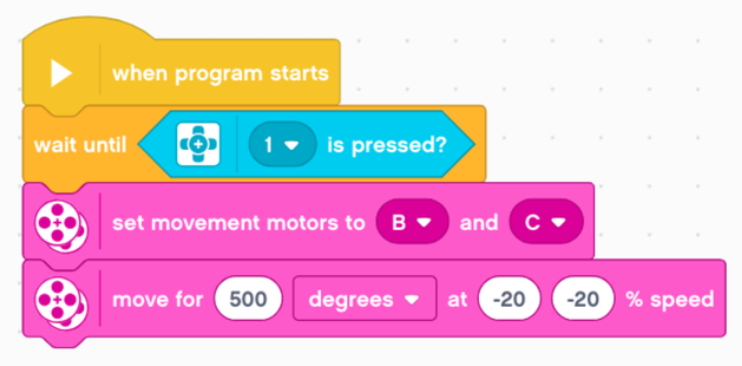
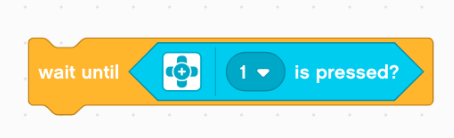
1- Wait [robot don't do anything] Until [Touch sensor is "pressed"]
2- Robot moves BACKWARD for 500 degrees at the speed of 20%.

Notice that it does the opposite from the last one
1- Robot "start moving"
2- stop when sensor is "pressed"
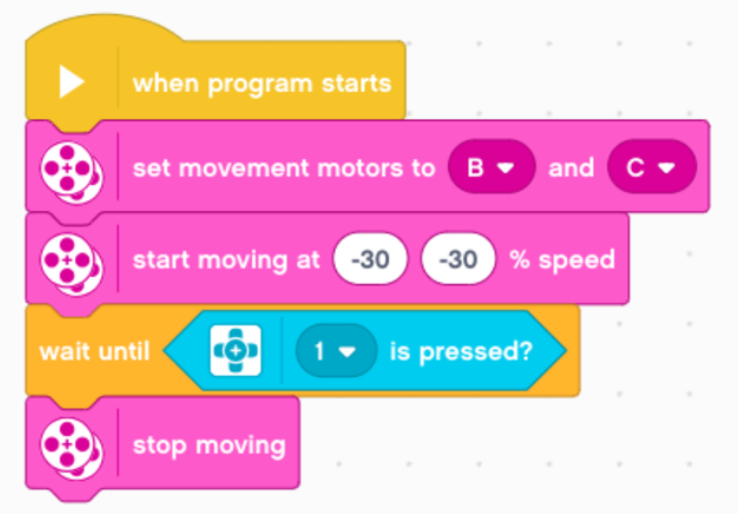
1- Wait [wheels move backward at speed of 20% repeatedly] Until [touch sensor is "pressed"]
2- Stop moving.
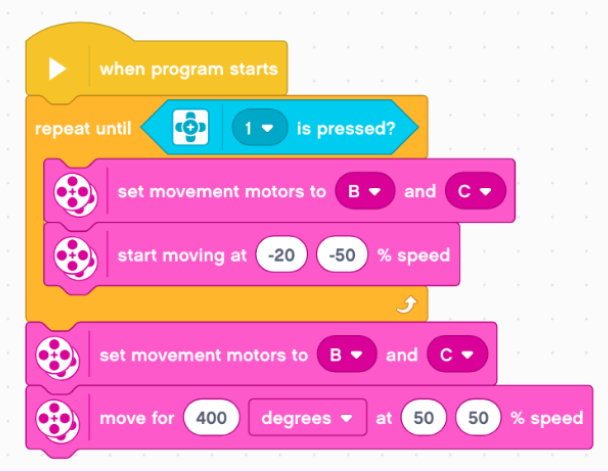
Notice that there are 2 "set movement motor" blocks
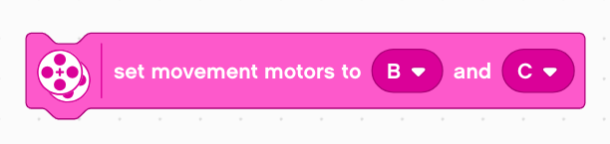
This is the "set movement motor"
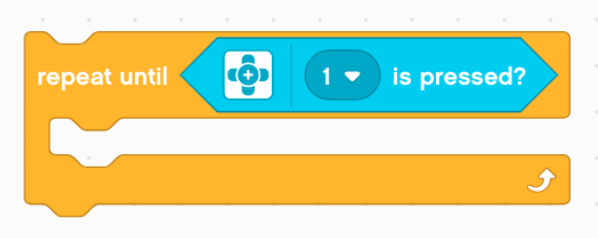
For Repeat Until "pressed"

It's better to put one of this pink block AT THE BEGINNING
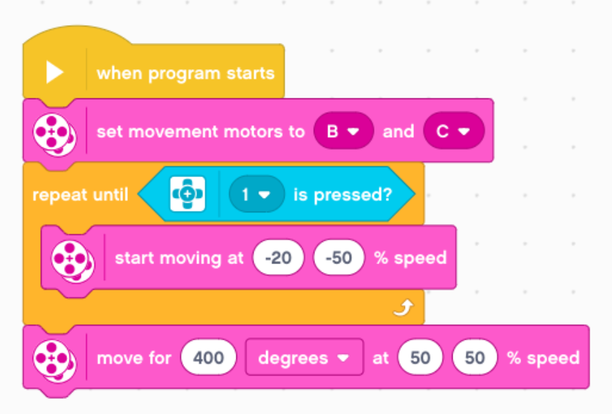
This is much more simple (that's what programmers do, make the codes more simple).
1- Repeat [Robot make a big turn toward left]
2- Until [Touch sensor is "pressed"]
3- Robot moves forward for 400 degrees at the speed of 50%.

Hint:
-> Use "forever" loop
-> 1st: use counter-clockwise
-> The degree I used it's 150. The speed is 50%.
-> Don't use too much degree, or the motor might be stuck.
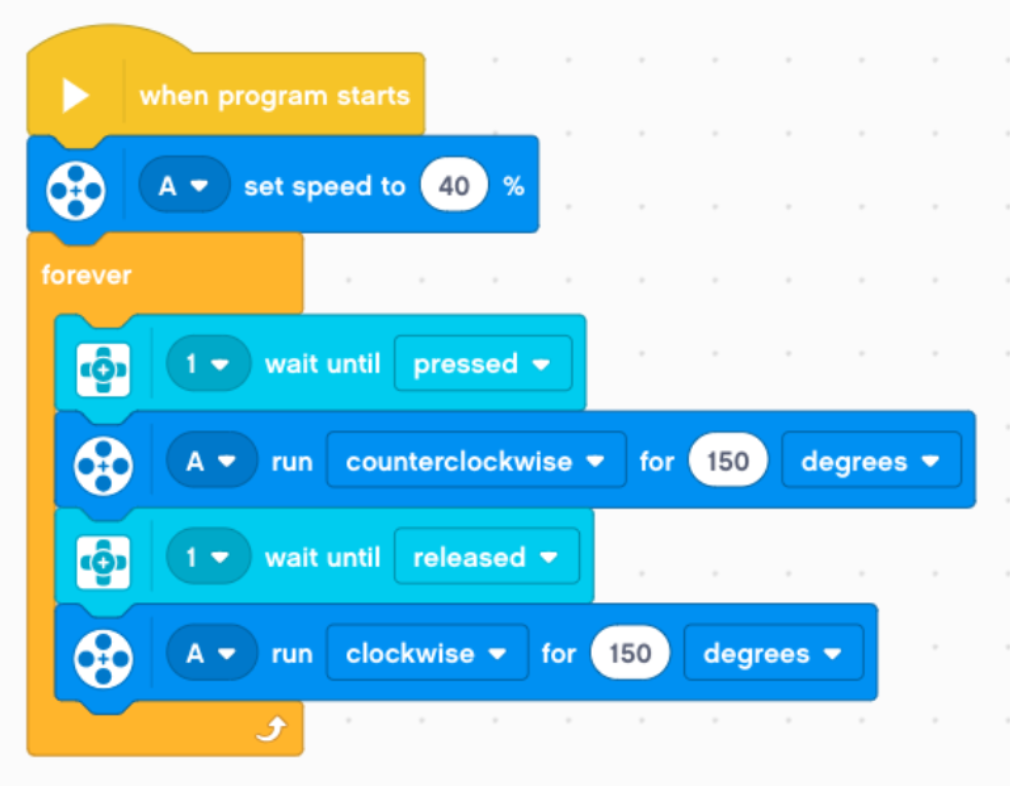
1- When touch sensor is [pressed], motor A go 150 degrees counter-clockwise (up).
2- When touch sensor is [released], motor A go 150 degrees clockwise (down).
-> Notice that I need wait until block. But you can explore and use loops inside loop (I might talk about this later on).